Ninety percent of the Mid-Atlantic Ridge, a 10,000-mile mountain chain that runs along the north-south axis of the Atlantic Ocean, is underwater. In some places, however, it rises above the surface— as it does in Iceland, where it moves north before plunging into the Arctic Ocean for a 1,100-mile stretch known as the Gakkel Ridge.
Image credit: Courtesy of Louis Whitcomb
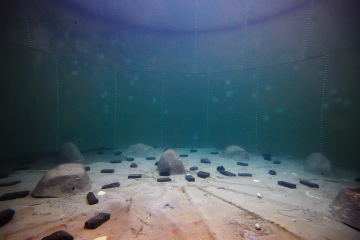
In October 2016, Louis Whitcomb, a Johns Hopkins professor of mechanical engineering, was aboard the icebreaking research vessel Polarstern, watching live video delivered by Nereid Under Ice, the remotely operated underwater vehicle (ROV) he developed in collaboration with the Woods Hole Oceanographic Institution. Attached to Polarstern via a fiber-optic tether slightly thicker than a human hair, the vehicle was half a mile deep in the Arctic Ocean's frigid waters, training its camera on a lush bounty of coral, sea sponges, starfish, and shrimp.
"The top of the Karasik Seamount," says Whitcomb, referring to a mountain along the Gakkel Ridge, "was teeming with life." The expedition was the latest in a string of discoveries facilitated by Whitcomb and other robotics experts who, since the 1960s, have developed tools enabling oceanographers to explore—via submarines, ROVs, and autonomous underwater vehicles (AUVs)—what was once unreachable. On that day, in an ice-covered region, it was "the first time a vehicle of this capability operated on a seamount in the Arctic Ocean," Whitcomb says. "It could maneuver freely near the sea floor, land, take samples, and bring them back." And yet, he adds, "we only explored a very small section of the seamount. It's a big ocean."
Whitcomb's right. Oceans cover 70% of the world's surface, yet only a small percentage of them, he says, have been explored in detail for various reasons, not the least of which are dangerous conditions. Atop the Karasik Seamount, for example, the pressure is 75 times the amount at sea level, far too dangerous for humans, who, in scuba gear, don't usually dive beyond 130 feet. And in excess of 600 feet deep, light from the surface no longer travels, turning the ocean pitch black. Hence the need for submersibles, which, like Nereid, can cost millions of dollars and are unable to rely on GPS. While satellite technology enables the Air Force to operate drones halfway around the world, "radio waves for data communication and GPS signals don't work under the ocean," Whitcomb points out. But for 25-plus years, Whitcomb, who founded and directs the Johns Hopkins Dynamical Systems and Control Laboratory, has been tackling these challenges by focusing on improving the navigation and control of robotic vehicles.
"He's doing more than creating tools," says Zak Harris, a former PhD student now working at Draper Laboratory, which developed the navigation system for the Apollo moon missions. "The same tools and principles he uses, we apply to our missions. They're broadly applicable in the self-driving-car and drone worlds. Louis is phenomenal at forwarding robotic systems, which are the future of discovery."
Ocean exploration, in particular, is important for many reasons. Studying everything from marine life to currents and the transport of gases and nutrients, oceanographers can demonstrate how the ocean impacts weather and food supplies. In Arctic regions, especially, where glaciers are melting at alarming rates, it's a bellwether for climate change.
And the Mid-Atlantic Ridge serves as a mecca for the study of plate tectonics, or the movement of the Earth's crust. Starting in the 1950s, oceanographers discovered volcanic activity along two ridges, the Mid-Atlantic and the East Pacific Rise, where the planet's core bubbles up, cools down, and adds volume to the sea floor while enabling marine life to thrive, thanks to hydrothermal vents.
In 1977, one of the earliest human-occupied research submersibles, the Alvin, came across clams in waters too deep for light to penetrate. Clams feed off algae, which, under normal circumstances, need the photosynthesis provided by sunlight to thrive. "There's no photosynthesis around the deep ocean hydrothermal vents; it's too dark," explains Whitcomb, who's helped upgrade the still-operable Alvin. "But there are sulfide compounds coming up through these vents, and bacteria can live on them. It's a chemosynthetic ecosystem, in which chemosynthetic bacteria are the primary producers for the food chain of the entire ecosystem surrounding the vent."
While Whitcomb, a fan of Jacques Cousteau growing up, has always been fascinated with oceanography, it wasn't until the early 1990s that he envisioned his involvement in it. As a grad student studying robotics at Yale, he visited the Woods Hole Oceanographic Institution, home of the Alvin, and realized that "people were developing robots for ocean science, which sounded like the coolest thing in the world. I said, 'How do I do that?'"
He accepted a postdoc position at Woods Hole, studying under Senior Scientist Dana Yoerger, and a career was launched, with Whitcomb joining the faculty at the Whiting School of Engineering in 1995. He has since helped develop several generations of navigation and control systems, earned 15 patents, accumulated academic and teaching awards, and worked with scores of graduate students and postdocs, many of whom are now robotics professionals.
As a PhD student, Harris worked closely with Whitcomb to develop an acoustic navigation system—an underwater alternative to GPS—for lightweight AUVs. Whitcomb, he says, is an exceptional mentor for two major reasons. First, he's a Renaissance engineer, doing everything from wiring and soldering to writing computer code and mathematical proofs. But he also instills in his students the "hypothesis-simulate-experiment" structure, "which is something I still use," Harris says.
The first step in the "experiment" part of that structure usually takes place in the 46,000-gallon hydrodynamics tank Whitcomb had constructed in Homewood's Krieger Hall almost 20 years ago. If the tools and submersibles tested in the 14-foot-deep tank work to satisfaction, it means they're ready for testing in deeper waters, ranging from the nearby Chesapeake Bay to the Arctic Ocean.
Whatever the project, Whitcomb tackles only what he considers formidable robotics challenges. "I try not to work on incremental advances," he says. "I think where university researchers can add the most value is in developing new technology enabling a person to do something they couldn't before."
In 2009, for example, he was a co-principal investigator on Nereus, a hybrid vessel that could operate as either an AUV or ROV and reach the deepest part of the ocean, the Marianas Trench, at roughly 11,000 meters—about 7 miles—below the surface of the Pacific Ocean. While other submersibles, both inhabited and uninhabited, had reached the bottom, Nereus "was a prototype vehicle that used new tether technology our team developed," Whitcomb recalls. Previously, ROVs were connected to extraordinarily costly surface ships via steel cables limiting their horizontal and vertical movement. But the more flexible fiber-optic cable, later utilized for Nereid, allowed for much deeper and wider dives off far-less-expensive ships while serving as a conduit for data, photo, and video delivery. "The goal," Whitcomb says, "was to give scientists the first-ever routine access to the ocean below 7,000 meters."
Much of Whitcomb's recent work has shifted from developing superexpensive vehicles to, as he says, "developing new ways to provide very accurate navigation for underwater vehicles that are small and relatively low cost."
In August 2018, Whitcomb and two of his students participated in a 10-day research mission just off the coast of Bermuda, where they tested a $20,000 off-the-shelf fiber-optic gyroscope about half the size of a soda can. While $20K isn't pocket change, gyrocompasses are "typically large and expensive—$100,000—and the size of a lunchbox," Whitcomb says. "Our contribution," he adds, "was coming up with algorithms for using [the less-expensive gyroscope] to estimate the vehicle's attitude—roll, pitch, and heading. It's perfect for a small vehicle."
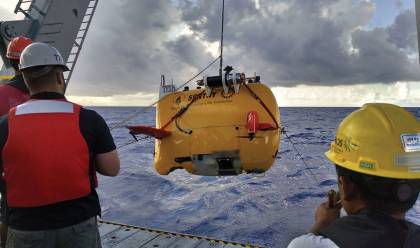
Image caption: Sentry is recovered after a dive on the Bowditch Seamount.
Image credit: Courtesy of Louis Whitcomb
The Woods Hole AUV Sentry is not small; it's about the size of a compact car. But it served as the ideal platform for experiments conducted by several engineering teams off Bermuda's coast, where Rachel Hegeman, a computer science grad student at the time, assisted Whitcomb. "That was my first trip like that, and it was incredible," she recalls.
Her job was "to help with quick coding and other robotics tasks," including downloading data collected during Sentry's 12-hour dives—with the Bowditch Seamount, an extinct underwater volcano, serving as the centerpiece. The first day, Hegeman grappled with seasickness in cramped quarters: two bunks to a room and shared bathrooms. But the cooks preparing the food were "amazing" and the entire operation impressive. "I was in awe of all the processes that take place to keep the boat moving and experiments running," says Hegeman, now a software engineer at the autonomous vehicle company Waymo.
That same low-cost gyroscope was affixed to a much smaller AUV—the 6-foot-long Iver3—when Whitcomb and Zak Harris tested their navigation tools and algorithms in the less-exotic waters of the Chesapeake in 2018 and 2019. The results, included in research papers published by the likes of the Journal of Field Robotics, are now in the public domain. "I got an email recently from an engineer starting a company developing a vehicle for operations in oceanic trenches, and he wants to know how to navigate them," Whitcomb says. "We sent him some of our recent papers to say, 'This works; here's the algorithm.'"
Asked if, given an unlimited budget, he could come up with a dream project he'd like to work on, Whitcomb dismisses the notion, saying research projects are always limited in time and funding. Then, after a few moments, he offers this: "I would like to put together a sustained series of deployments or, as we call them, oceanographic cruises, where we'd push the boundaries of technology to enable ocean scientists to explore parts of the ocean they can't currently access, and to engage students in those operations—not just do the science but train the next generation, those leading research 25 years from now."
Posted in Science+Technology
Tagged mechanical engineering, robotics, oceanography, the ocean issue