

Hate the cockroach all you want, but there's a lot to admire about its physical prowess. For one, the insect can zip across surfaces at 50 blps—body lengths per second. To put that into human perspective, by the time Olympic champion sprinter Usain Bolt reached the 10-meter mark in a 200-meter race, a scaled-up cockroach would have crossed the finish line. The bug can also withstand pressure 900 times its body weight with barely a scratch, endure 10 times the radiation that would kill a human, and squeeze through the smallest of cracks, thanks to its flexible exoskeleton and oil-secreting glands. No wonder Johns Hopkins physicist Chen Li and his colleagues in the Terradynamics Lab have taken inspiration from this ubiquitous pest to design robots that can traverse unpredictable, sometimes treacherous terrain such as building rubble, a forest floor, or mountain boulders.
To inform the design of a bio-inspired robot, Li analyzes actual cockroach motion, putting them through obstacle courses like laser-cut paper that simulates tall grass. "We try to understand the principles of an animal's mechanical interaction with the environment, basically how animals make use of their bodies to move around, through, or over objects," says Li, an assistant professor of mechanical engineering. "We then transfer those principles to the robots." Li is currently testing several prototypes, with the plan to integrate elements of each into a single design. The team hopes the roach will aid in search and rescue missions by transmitting data such as signs of life or structural safety.
Shell
The robot has a thermal-formed rounded soft shell that is malleable and elastic enough to compress and then recover its form. The shape also reduces draft and terrain resistance, meaning it can quickly roll its body to either side to slide through grass, a small crack, or any other obstacle. In nature, cockroaches use their malleable shells to flatten themselves to a quarter of their height, or roll through gaps less than half their width.
Legs
One current version of the robot features six identical short, C-shaped legs. The powerful appendages move in an alternating tripod gait that maintains three legs on the ground at all times to help the robot remain stable, scamper across smooth surfaces, and push over and through tougher terrain.
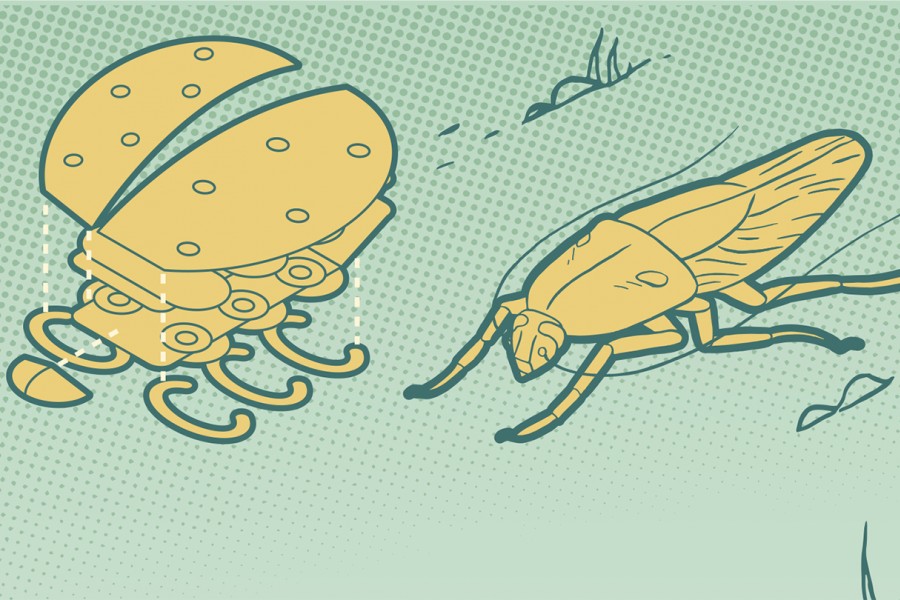
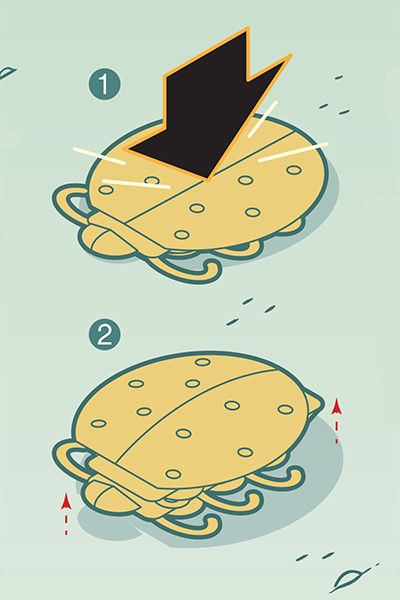
Self-righting wings

Cockroaches only fly short distances as needed, but they also use their wings as an extra set of appendages to push up and flip their bodies over when necessary. One version of the robot has a bisected plastic outer shell that opens up like wings when the robot is on its back.
Vision and sensors
Like a simple windup toy, the device can move only by following a preprogrammed command, and its passive interaction with the environment takes care of the rest. However, future versions can be remotely controlled and will likely include sensors and a camera to transmit information and help navigate. Robo roaches could be outfitted with thermal sensors to search under debris, or with a toxicity sensor to test air quality in the case of gas leak.

Head
Li is studying how cockroaches use both head and antennae to feel what's in front of them and traverse terrain. "We're just beginning to study how the cockroach's head moves up and down, and we think this vibration and oscillation help push it forward," he says. "Cockroach motion is actually a complex, integrated system. It's not just the body shape. One big challenge going forward is how to integrate all this function in one robot."
Size

The prototypes are palm-sized, but future iterations could be made bigger or smaller as necessary. "When people build robots, size does matter," Li says. "If we build them small, we have a more limited choice of actuators, sensors, and motors we can integrate into the design, and the battery is also smaller." But Li says smaller robots can squeeze into tight spots, effectively serving as "scouts" that gather information and get the lay of the land for humans and larger robots.
Posted in Science+Technology
Tagged mechanical engineering, robotics
